Therapieassistenzsystem zur Rehabilitation von Haltungsschäden bei degenerativen Erkrankungen im Muskel- Skelett – Apparat auf der Basis einer adaptiven Korrektur der Gangdynamik
Mit dem hier dargestellten Therapiesystem soll die gegebene Marktlücke zwischen (meist nur in der stationären Therapie statisch anwendbaren) Gangtrainern zur Rehabilitation und den marktüblichen Rollatoren geschlossen werden.
Gewissermaßen „erziehen“ Rollatoren den Nutzer in dem Sinne sogar zu einer gewissen Unselbstständigkeit.
Denn wer längere Zeit einen Rollator benutzt, verlernt dadurch auch tendenziell das normale Gehen, weil sich der Körper an die Gangart mit einer „rollender Stütze“ gewöhnt hat, die ihm abnimmt, sich selbst stabil halten zu müssen.
Gangtrainer sind dagegen von vornherein so konstruiert, dass sie den Patienten an jenen Positionen und Gangstellungen gezielt stabilisieren, wo er selbst kaum noch zur Eigenstabilisation bzw. Eigenbewegung fähig ist.
Allerdings werden sie nur stationär in Kliniken oder Praxen, nicht im Alltag genutzt.
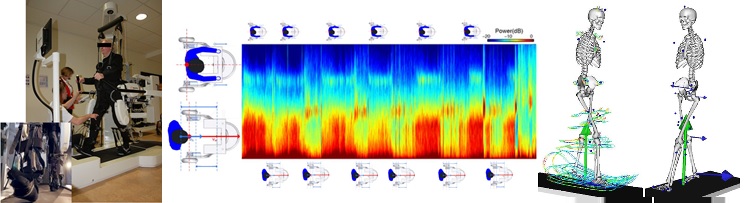
Beim vorgestellten System handelt es sich erstmals um eine mobile Version eines Gangtrainers, für das ein Sensorerfassungssystem entwickelt wurde, welches durch die zeitbezogene Erfassung und Integration von Belastungsunterschieden an Stellen, welche für die Biodynamik der Bewegungshaltung des menschlichen Körpers von wesentlicher Bedeutung sind eine permanente und automatisierte Ganganalyse und –Korrektur während der Bewegung ermöglicht.