


Humanoid Robot Space Making
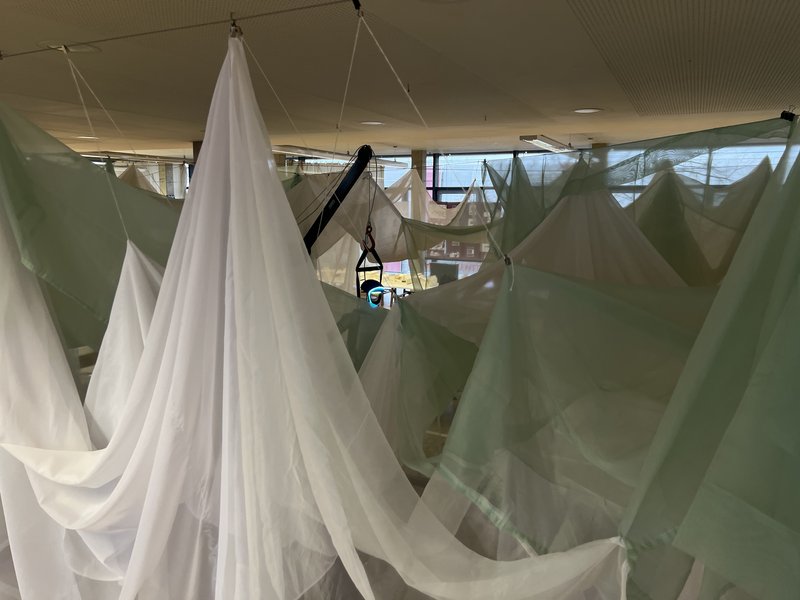
Im Master Seminar WiSe25-26 HUMANOID ROBOT SPACE MAKING hat sich mit diesen Fragen beschäftigt: Was entsteht, wenn wir die Gestaltungsfähigkeit eines humanoiden Roboters architektonisch denken und neue Räume erzeugen? Im Semester wurde der humanoide Roboter Unitree G1 nicht als Maschine zur Optimierung standardisierter Aufgaben untersucht, sondern als aktiver Mitgestalter von Raum. Im Zentrum stand die Entwicklung einer räumlichen Installation, die Architektur als dynamischen, beweglichen Zustand begreift. Die robotischen Bewegungen wurden mittels Python-Code auf Low-Level-Ebene entwickelt, zunächst im virtuellen Raum simuliert und anschließend direkt auf den realen Roboter übertragen. Im Entwurfsprozess testeten die Studierenden unterschiedliche räumliche Konzepte und Prototypen, darunter verschiebbare und rotierende Wände, und letztendlich das finale Konzept mit Textilien. Die physischen Grenzen des Roboters führten zur Wahl leichter Materialien, die sich mit geringer Kraft bewegen lassen. Studierende entwickelten robotische Bewegungslogiken, passten Code und Gelenkbewegungen an und untersuchten, wie der humanoide Roboter selbst zu einem Akteur der Raumproduktion wird – nicht als Werkzeug, sondern als Teil einer bewegten, performativen Architektur. So entstand ein räumliches Szenario, das sich durch die Bewegungen des Roboters kontinuierlich verändert.
Betreuer/in: Marine Lemarié, Studierende: Geraldine Vella, Leander Lange, Maria Parkhomchuk, Mohamad Ayneyeh, Mustafa Bannoud, Ruoyu Li, Theo Schoenau, Wenxin Yu, Yaoxin Zhang, Zhenwei Ding